
コロナの自粛も明けから2回目のロボットプログラミング授業。
今回は少し難しくなり、キャリブレーションロボとジュエリーボックス、ダンブカーを作ってもらいました。
組み立てからプログラミングの内容まで徐々に難しくなってきます。
 塾長
塾長
ジュエリーボックス(ブザーやサーボモーターなど)
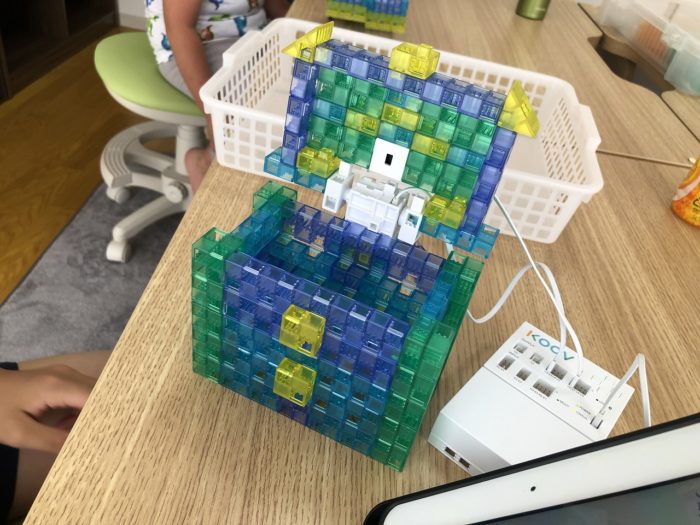
ジュエリーボックスはサーボモーターとブザーを取り入れたロボットプログラミング。
蓋が閉じる前と閉じた後で音が変わるようにプログラミングしていきます。
箱をつくるのに結構時間がかかっていましたが、それでも時間内にクリア。
実際に動かした動画こちらです。
また、これを作ったゆうたくんは、更に自分でカスタマイズ。

ジュエリーボックスの高さを変更して、さらにグレードアップさせていました。
マニュアルにはないことをやることもロボットプログラミングではとても大切なことです。
キャリブレーションロボ(DCモーターとサーボモーター)
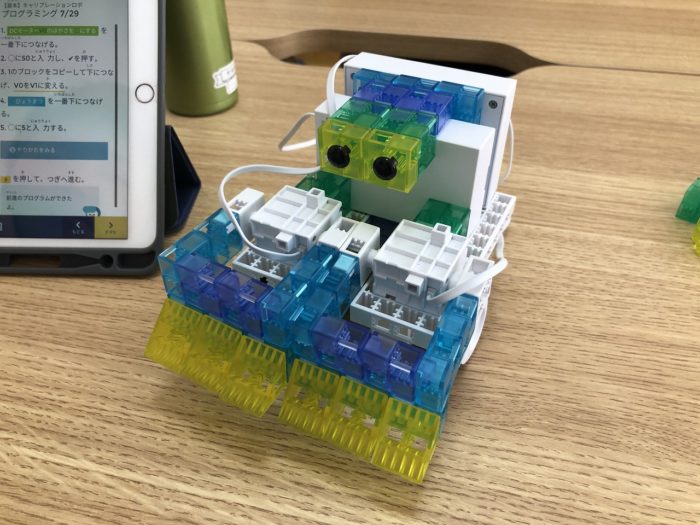
こちらは二人の生徒が作ったDCモーターとサーボモーターで動くキャリブレーションロボです。
DCモーターを作って前進したり後退したり、サーボモーター付くかって前の部分が上下に動くようプログラミングします。
上記の動画を少し前の部分を変えてチアリーダーを意識して作っています。
しっかりとプログラミングを組むことでここまで自由に動かすことが可能です。
ダンプカー(DCモーターとサーボモーター)

最後にこれは小学2年生が作ったダンプカーです。
こちらもキャリブレーションと同じでDCモーターとサーボモーターを使って作ったロボットプログラミング。
上手にプログラミングを組むことで後退して後ろの部分で物を落とすようにすることができます。
https://www.youtube.com/watch?v=wLSYK5918xA
DCモーターの速さなどが変わるとうまく思った位置に動かすことができないので、その辺りも思考錯誤しながら行っていました。


コメントを残す